商品詳細
画像クリックで拡大します



Elecrow APK14055C
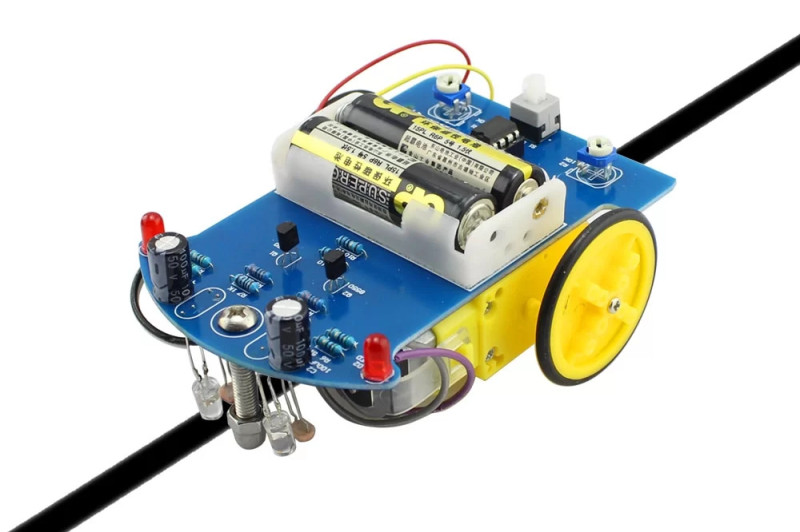
ライントレースカー(日本語説明書無し)
2つの光センサーを使って、黒い線に沿って自動で進むライントレーサーです。
LEDから発射された赤い光がコースに当たって反射するかどうかを光センサーでキャッチし左右のモーターをコントロールします。
タイヤを動かすしくみは、モーターの軸の回転をそのままタイヤに伝えるアイドラー駆動方式で、タイヤが回る仕組みが分かりやすくなっています。
作り方は簡単ですが、マニュアルは提供しません。
代わりにいくつかの組み立て手順と回路図を提供します。
組み立て手順:
最初のステップ: 回路の一部の溶接
この部分は比較的単純で、溶接順序として元の高さを低い方から高い方へ溶接するという原則に従っています。
まず、8つの抵抗をはんだ付けする必要があります。
マルチメーターを使用して抵抗を確認することを忘れないでください。
三極管、LED ライト、電解コンデンサなどの他の極性コンポーネント、これらのコンポーネントは、溶接の方向、溶接コンデンサ、ショートピンがマイナスであることを写真で参照する必要があります。
LEDを溶接するときは、長いピンがプラスになります。部品が焼ける可能性があるため、溶接時間が長すぎてはいけないことに注意してください。
D4、D5、R13、R14 は一時的に溶接されなくてもよく、集積回路チップがベースに一時的に挿入されなくてもよいです。
ステップ 2: 機械的な組み立て
まずネジとナットを使用してキャスターをPCBボードに固定し、次にバッテリーボックスを両面接着剤でPCBボードに貼り付け、バッテリーボックスを予備の穴を通してワイヤーに貼り付け、溶接します。
PCBボード、赤い線は+ 3V電源に接続し、黄色の線はアースにリンクします。
次に、ホイールを組み立てる必要があります。
最初に固定穴をモーターのパドルに接続し、次にホイールが外れないようネジで固定します。
オフにするには、最終的に、PCB ボード上の固定位置に固定するモーター付きの 2 つのホイールが必要になります。
最後に、モーターのワイヤーも PCB 基板上の固定位置に溶接されます。
ステップ 3: 光電回路を設置する
フォトレジスタと発光ダイオードをPCBの反対側、つまり車の前面の下部に取り付け、接地距離を約5mmに保ち、抵抗とダイオード間の距離を約5mmに保ちます。
そして最後にパワーテスト。
ステップ4: 車のデバッグ
単三電池2本を電池ボックスに差し込み、スイッチを「オン」にすると、車は前進し続けます。
今度は感光抵抗器の左側を握ると、車は右側にあります。
車輪が回転する必要があります。抵抗器の右側を保持すると、車輪の左側が回転します。
車が後退している場合は、2つのモーターのワイヤを同時に交換する限り、1つだけであれば、後は裏側のワイヤーを交換するだけです。
LEDから発射された赤い光がコースに当たって反射するかどうかを光センサーでキャッチし左右のモーターをコントロールします。
タイヤを動かすしくみは、モーターの軸の回転をそのままタイヤに伝えるアイドラー駆動方式で、タイヤが回る仕組みが分かりやすくなっています。
作り方は簡単ですが、マニュアルは提供しません。
代わりにいくつかの組み立て手順と回路図を提供します。
組み立て手順:
最初のステップ: 回路の一部の溶接
この部分は比較的単純で、溶接順序として元の高さを低い方から高い方へ溶接するという原則に従っています。
まず、8つの抵抗をはんだ付けする必要があります。
マルチメーターを使用して抵抗を確認することを忘れないでください。
三極管、LED ライト、電解コンデンサなどの他の極性コンポーネント、これらのコンポーネントは、溶接の方向、溶接コンデンサ、ショートピンがマイナスであることを写真で参照する必要があります。
LEDを溶接するときは、長いピンがプラスになります。部品が焼ける可能性があるため、溶接時間が長すぎてはいけないことに注意してください。
D4、D5、R13、R14 は一時的に溶接されなくてもよく、集積回路チップがベースに一時的に挿入されなくてもよいです。
ステップ 2: 機械的な組み立て
まずネジとナットを使用してキャスターをPCBボードに固定し、次にバッテリーボックスを両面接着剤でPCBボードに貼り付け、バッテリーボックスを予備の穴を通してワイヤーに貼り付け、溶接します。
PCBボード、赤い線は+ 3V電源に接続し、黄色の線はアースにリンクします。
次に、ホイールを組み立てる必要があります。
最初に固定穴をモーターのパドルに接続し、次にホイールが外れないようネジで固定します。
オフにするには、最終的に、PCB ボード上の固定位置に固定するモーター付きの 2 つのホイールが必要になります。
最後に、モーターのワイヤーも PCB 基板上の固定位置に溶接されます。
ステップ 3: 光電回路を設置する
フォトレジスタと発光ダイオードをPCBの反対側、つまり車の前面の下部に取り付け、接地距離を約5mmに保ち、抵抗とダイオード間の距離を約5mmに保ちます。
そして最後にパワーテスト。
ステップ4: 車のデバッグ
単三電池2本を電池ボックスに差し込み、スイッチを「オン」にすると、車は前進し続けます。
今度は感光抵抗器の左側を握ると、車は右側にあります。
車輪が回転する必要があります。抵抗器の右側を保持すると、車輪の左側が回転します。
車が後退している場合は、2つのモーターのワイヤを同時に交換する限り、1つだけであれば、後は裏側のワイヤーを交換するだけです。
※日本語説明書が付属していない為、上級者向けとなっています。
※サイズ超過の為ネコポス不可
秋葉原本店取扱フロア:3階※サイズ超過の為ネコポス不可
在庫拠点
秋葉原
| 【関連情報】 |
参考youtube |
管理コード:EEHD-67JH



